打开微信扫一扫
30
32
254
中级会员
四旋翼飞行器控制系统硬件电路设计.part1.rar
2018-8-3 19:59 上传
点击文件名下载附件
1000 KB, 下载次数: 41
四旋翼飞行器控制系统硬件电路设计.part2.rar
891.27 KB, 下载次数: 36
使用道具 举报
发表回复 回帖后跳转到最后一页
收藏:2 | 帖子:50
强大的硬件资料给大家分享,需要的自取,我
BLDC电机 DS和GS电压震荡
走进飞行时间传感技术揭秘TOF传感器工作原
视频讲的真好
运用无人机超声波传感器 MB7052测量无人机
全桥整流滤波电路中用于滤波的电容容值如何
电话:15821751981工作日 9:00-20:00在线
扫描掌上手机版二维码随时随地玩本站


 BLDC电机 DS和GS电压
BLDC电机 DS和GS电压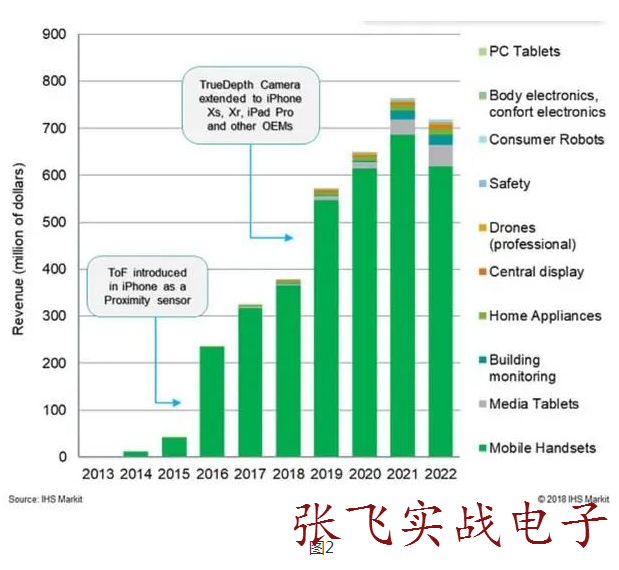 走进飞行时间传感技术
走进飞行时间传感技术 运用无人机超声波传感
运用无人机超声波传感 机载氧气传感器在航空
机载氧气传感器在航空 同仁们:你们的电子产
同仁们:你们的电子产 为什么每次烧录程序总
为什么每次烧录程序总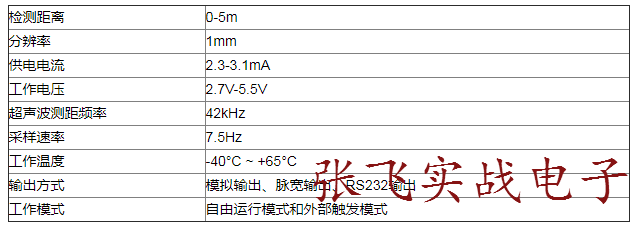 机器人应用的超声波传
机器人应用的超声波传 小白求助!!关于AD10
小白求助!!关于AD10 FCI推出专为远程油位
FCI推出专为远程油位 传感器在户外广告机排
传感器在户外广告机排 关于PFC,这文章讲的
关于PFC,这文章讲的 风速风向传感器在无人
风速风向传感器在无人



 发表于 2018-8-3 20:03:41
发表于 2018-8-3 20:03:41





